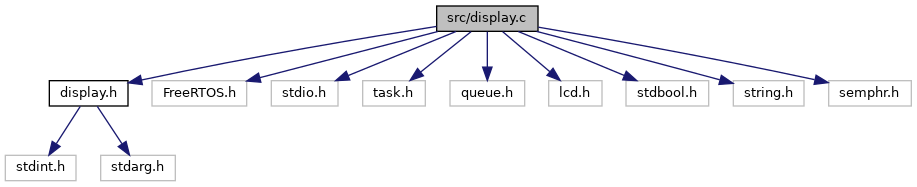
#include "display.h"#include <FreeRTOS.h>#include <stdio.h>#include <task.h>#include <queue.h>#include <lcd.h>#include <stdbool.h>#include <string.h>#include <semphr.h>
Include dependency graph for display.c:
Go to the source code of this file.
Data Structures | |
| struct | log_message_t |
| Structure to describe a log message. More... | |
Macros | |
| #define | STACKSIZE_TASK ( 256 ) |
| Stack size of the display task. More... | |
| #define | PRIORITY_TASK ( 3 ) |
| Priority of the Display task (low priority number denotes low priority task) More... | |
| #define | QUEUE_SIZE 10 |
| Size of the message queue. More... | |
| #define | DISPLAY_LINES 30 |
| Number of lines that fit on the display (vertically) More... | |
| #define | DISPLAY_CHARS 64 |
| Number of horizontal characters that can be displayed. More... | |
Functions | |
| uint8_t | display_log (uint8_t id, const char *fmtstr,...) |
| Logs a message to the display global. More... | |
| void | display_init () |
| Initializes the display and starts the display task global. More... | |
Variables | |
| uint8_t | visible_messages =0 |
| Number of currently visible messages. More... | |
| uint8_t | buffer_offset = 0 |
| Offset in the message_buffer to get to the top message. More... | |
| log_message_t | message_buffer [DISPLAY_LINES] |
| buffer of all visible messages (ring buffer!) More... | |
