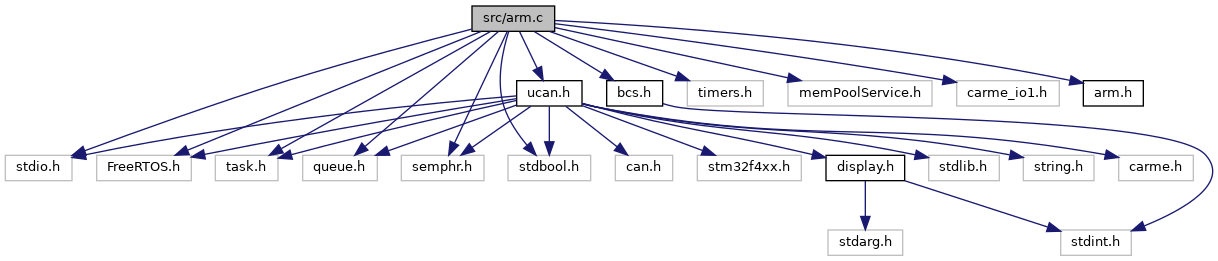
#include <stdio.h>#include <FreeRTOS.h>#include <task.h>#include <queue.h>#include <semphr.h>#include <timers.h>#include <memPoolService.h>#include <stdbool.h>#include <carme_io1.h>#include "arm.h"#include "ucan.h"#include "bcs.h"
Include dependency graph for arm.c:
Go to the source code of this file.
Macros | |
| #define | BUTTON_T0 0x01 |
| #define | BUTTON_T1 0x02 |
| #define | BUTTON_T2 0x04 |
| #define | BUTTON_T3 0x08 |
| #define | ROBOT_L_STATUS_REQUEST_ID 0x150 |
| #define | ROBOT_L_STATUS_RETURN_ID 0x151 |
| #define | ROBOT_L_COMAND_REQUEST_ID 0x152 |
| #define | ROBOT_L_COMAND_RETURN_ID 0x153 |
| #define | ROBOT_L_RESET_ID 0x15F |
| #define | COMAND_DLC 0x006 |
| #define | STATUS_REQEST_DLC 0x002 |
| #define | ROBOT_R_STATUS_REQUEST_ID 0x160 |
| #define | ROBOT_R_STATUS_RETURN_ID 0x161 |
| #define | ROBOT_R_COMAND_REQUEST_ID 0x162 |
| #define | ROBOT_R_COMAND_RETURN_ID 0x163 |
| #define | ROBOT_R_RESET_ID 0x16F |
| #define | MASK_SWITCH_0 0x01 |
| #define | MASK_SWITCH_1 0x02 |
| #define | MASK_SWITCH_2 0x04 |
| #define | MASK_SWITCH_3 0x08 |
| #define | MASK_SWITCH_4 0x10 |
| #define | BLOCK_TIME_MIDDLE_POS 200000 |
| #define | MSG_QUEUE_SIZE 1 |
| #define | ARM_TASK_PRIORITY 2 |
| #define | ARM_TASK_STACKSIZE 256 |
| #define | TASK_DELAY 100 |
| #define | GRIPPER_MAX 1 |
| #define | GRIPPER_MIN 0 |
Enumerations | |
| enum | arm_select { arm_left =belt_left, arm_right =belt_right } |
| The arm_select enum differenciates between the different arms (left/right) More... | |
Functions | |
| void | move_roboter (void *pv_data) |
| Task for left and right arm. More... | |
| void | init_arm () |
| Creates the arm tasks. More... | |
| void | manual_arm_movement (void *pvData) |
| Task to move the roboter with the Buttons. To create this task unkomment it in the function init_arm() More... | |
Variables | |
| CARME_CAN_MESSAGE | robot_msg_buffer_right |
| CARME_CAN_MESSAGE | robot_msg_buffer_left |
| uint8_t | status_request [2] = {0x02,0x00} |
