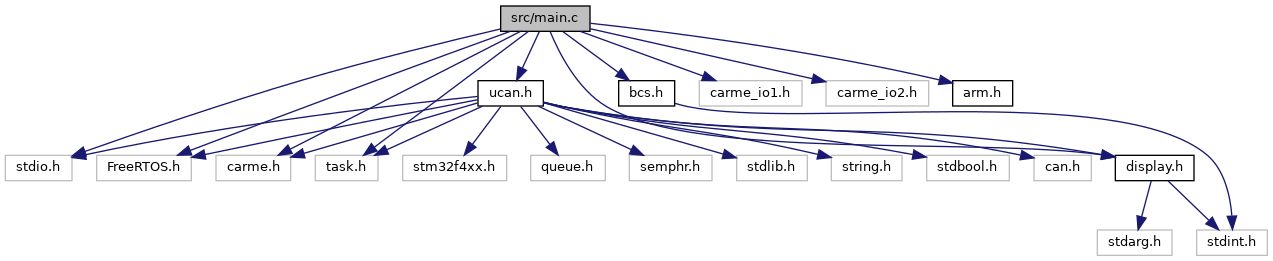
#include <stdio.h>#include <FreeRTOS.h>#include <carme.h>#include <carme_io1.h>#include <carme_io2.h>#include <task.h>#include "ucan.h"#include "display.h"#include "bcs.h"#include "arm.h"
Include dependency graph for main.c:
Go to the source code of this file.
Functions | |
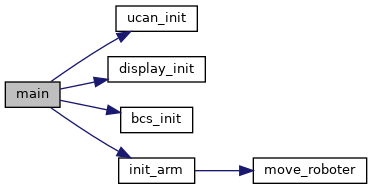
| int | main (void) |
| Main function which calls the scheduler. More... | |